こんにちは!NCS(CanSat班)PMの鈴木伶菜です!
先日、種子島ロケットコンテストに参加してきました!今回は、大会に出場した機体の紹介と大会結果を報告したいと思います!
今回の種子島ロケットコンテストには、1・2年生合同チームから1機体、2年生から1機体、3年生から1機体が出場しました。
本大会は、クレーンを用いてCanSatを高度30mから投下し、着地後にゴール地点を目指して移動させ、その最終到達距離および到達時間を競う競技です。
彗
この機体は、1・2年生合同チームが開発した機体です。自律制御カムバック部門に出場しました。本機体は、2025年9月に北海道で開催されたスペースプローブコンテスト出場機を改良したものです。前大会で得られた課題を踏まえ、走行の安定性向上を目的として設計を見直しました。しかし大会では、パラシュート開傘時の衝撃により機体とパラシュートを接続していた釣り糸が切断され、落下時に機体が損傷し、走行不能となりました。
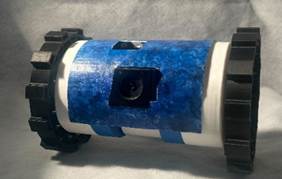
アルキゲニア
この機体は、2年生チームが開発した機体です。遠隔制御カムバック部門に出場しました。本機体は、車輪による回転ではなく、機体の伸縮運動を推進力とする独自の機構を採用しています。前後に取り付けたとげを地面に引っかけることで前進する構造であり、パンダグラフ機構および3連の外筒によりストロークの拡大を図りました。前回大会に出場した「マッコウクジラ」に引き続き、独創的でユーモアあふれる機体を製作しました。大会では着陸には成功したものの、とげが芝にうまく引っかからずスタックし、走行開始には至りませんでした。

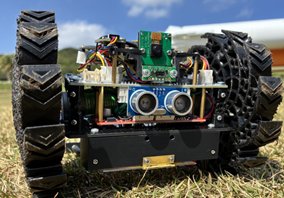
AXIOM AI
この機体は、4年生チームが開発した機体です。自律制御カムバック部門に出場しました。本機体は、0mゴールの達成を目的として開発されたオーソドックスなローバー型機体です。CFRP製ベースプレートやTPU製タイヤを採用し、軽量かつ高い耐衝撃性を実現しました。電装は3基板構成とし、各種センサを3台のマイコンで分散制御しています。また、AIの活用も試み、画像認識にGrove AI Vision V2を用いるとともに、制御プログラムの作成にはChatGPTを活用しました。さらに、パラシュート分離機構を機体とは独立して搭載しています。大会では、パラシュートが完全には展開せず想定通りの減速が得られませんでしたが、機体は大きな損傷なく、エンベロープ展開および自律走行モードへの移行には成功しました。しかし、分離に失敗したパラシュートが機体直下に残ったことで滑走状態となり、走行には至りませんでした。
総括として、全機体が走行に至らず、悔しい結果となりました。しかし、本大会で得られた経験や知見は非常に多く、今後の開発にとって貴重なものとなりました。今回の反省をチーム全体で共有し、次回大会へとつなげていきます。
目指せ!0mゴール!!
