実際に火星探査が行える
ローバーを開発する
このコンセプトのもと, NAFT 火星ローバ開発プロジェクトは2023年10月に宇宙開発チームNAFTのプロジェクトの一つとして, 誕生しました.
現在は, 火星ローバーの世界大会である2025年度URC(University Rover Challenge) への出場を目指して活動しています.
What’s URC?
アメリカのユタ州南部の砂漠に位置する火星砂漠研究所(MDRS)で毎年6月に開催されている, 学生を対象とした世界的なローバーコンテストです. 火星を探査し, 宇宙飛行士とともに働く, 次世代の火星探査機の設計と製作を課しています.
自律走行でのカムバック, ロボットアームを駆使した物資の配達や配置・細かい機械の整備, サンプルの採取・分析を通した生命探査などの多様なミッションをこなすことが求められています.
URC公式ホームページ
Our Schedule
2023年度
- 試作機カンナヅキの製作
初号機INITIUMの製作
- 試作機カンナヅキの製作
2024年度Ⅰ期
- INITIUMのアップデート/ローバ開発のための基礎技術の習得
Ⅱ期
- ワイヤー機構を用いたアームの完成とURCへ向けたミッションへの挑戦
- ワイヤー機構を用いたアームの完成とURCへ向けたミッションへの挑戦
Ⅲ期
University Rover Challenge 2025 審査通過
Our Team
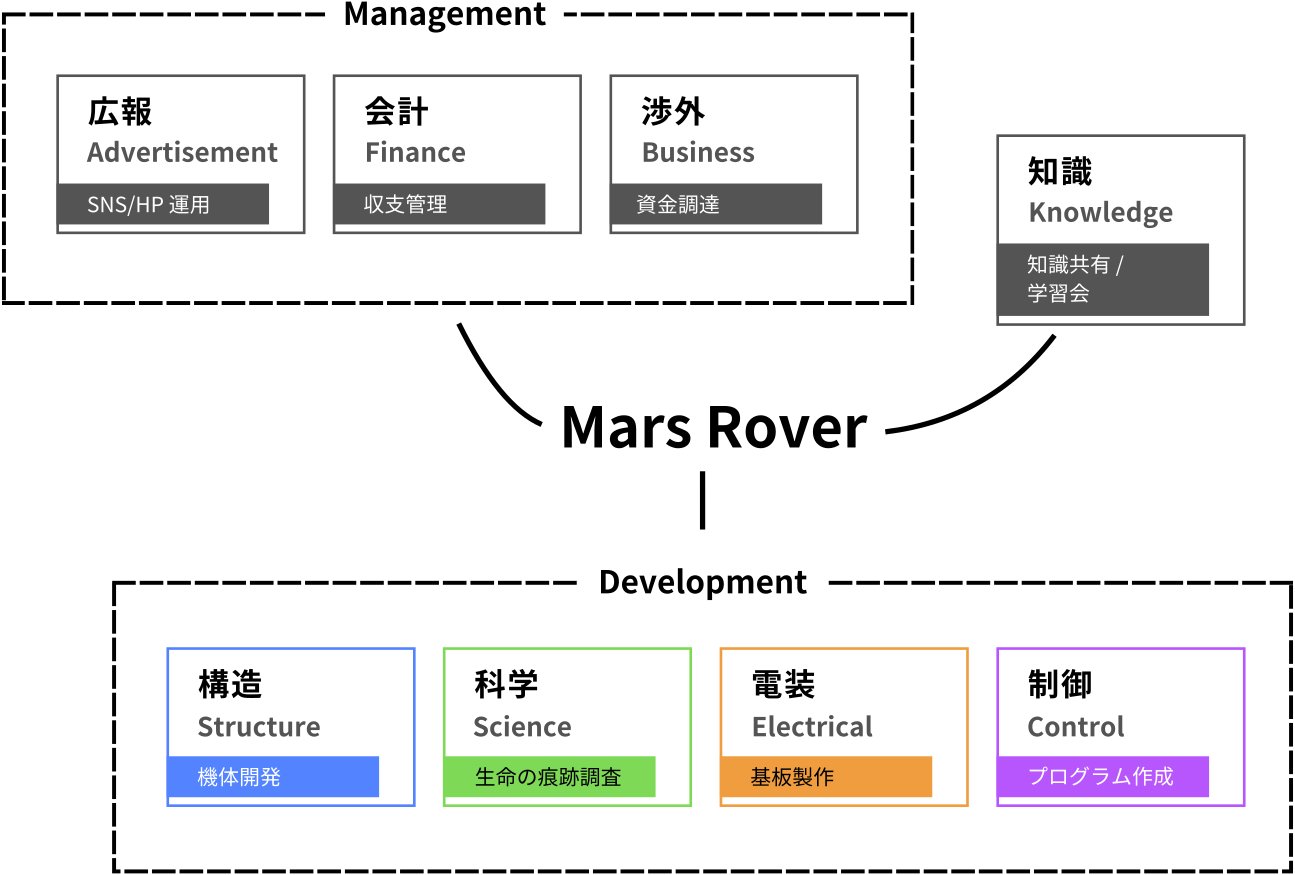
Development 部門
Development 部門では4つの班に分かれ, それぞれが互いにコミュニケーションを取りながら, 火星ローバーを製作しています.
Structure
Current goal:
INITIUM のアップデート, 新アームの設計
構造班では, 火星ローバーの車体やタイヤ, ロボットアーム等の設計・開発を行います.
URCでは, 不整地面での走行やロボットアームを用いた精密な作業, サンプル回収など, 様々なミッションが課されます.
構造班はこれらのミッションを達成するために, 起伏の激しい地形での走行を想定したタイヤや機構, そして繊細な作業を可能とするためのロボットアーム, さらには対象の地質標本を得るための装置などを設計・開発します.
Electrical
Current goal:
INITIUMを制御するための基板製作
電装班では, モータ制御, センサからの情報取得, 通信などを行う上で基幹となる回路や基板の製作を行います.
電装班はローバー上でシステムの実行を担うハードウェアの開発をします.
機体を制御する上で必要な要件を満たすだけでなく, 変化する設計に適応できる柔軟で頑強なハードウェアを設計・開発することが主な役割です.
Science
Current goal:
生命の存在を判断できる実験のデザイン
科学班では, 火星に生命の痕跡があるかを調査するための実験計画の作成や機器の開発を行います.
生命が存在するかどうかを確かめるために, 痕跡を得られそうな場所をフィールド内から探し出し, その場所の高解像度の写真や層序の写真の撮影, 及び地下の土を採取することが求められます.
採取した土はローバー内で微生物の存在の分析を行うとともに, サンプルとして密閉し, 基地局に持ち帰ります.
Control
Current goal:
INITIUMの自律・遠隔走行, アームを動かすプログラムの制作
制御班では, 遠隔走行・自律走行やロボットアームの動作に必要なプログラムの制作・テストを行います.
自律走行では, 与えられたGPS座標に向けて, 9軸センサーや赤外線センサー等を組み合わせ到達すること, またARマーカーをカメラで認識し追跡することや, 物体探知をすること等が求められます. 3DLiDARを用いた経路設計も行います.
遠隔走行では, 1 km以上離れた, かつ目視でローバーを観測できない地点からローバーを遠隔操作をすることが求められます. 遠距離においても, 安定した通信が行える環境を構築することが必要です.
また, 火星ローバーはロボットアームを用いて工具を扱うなど, 繊細作業を行う必要があります. スムーズに作業を行えるようなプログラムの制作を行います.
Management 部門
Business
Current goal:
活動に必要な資金・物品の調達
機体開発やイベントへの参加に必要な, 資金・物品の調達を行う班です. 今年度からできた班で, 渉外を担当します.
Contact us
以下のNAFT問い合わせフォームほか, SNSのDMなどでお気軽にご連絡ください.
Contact NAFT